昆蟲如何利用光流進行速度估計?
昆蟲依賴圖像運動或光流的感知來估計其相對於附近物體的速度。這些訊息為它們的避障提供了重要的資訊。然而,一些行為如估計與降落目標之間的絕對距離、準確測量絕對行程距離以及估計周圍風速,需要將光流轉換成絕對地面速度和與鄰近物體的距離。一些實驗表明昆蟲能夠執行這些計算,但它們實現這一目標的機制尚不清楚。
本篇研究開發了一種新的算法,結合了前進運動的幾何特徵和已知的昆蟲視覺處理特點,提出了昆蟲如何通過光流和加速度信息的組合直接估計絕對地面速度的假設,即昆蟲在運動期間如何通過視覺估計絕對速度,研究成果可應用於昆蟲大小的機器人。
光流估計:光流是由物體運動引起的視覺系統中的像素強度變化。研究團隊使用了光流估計方法來計算在昆蟲視覺場景中觀察到的光流場。這種方法可以通過比較連續幀之間的像素強度變化來計算光流向量,以表徵運動方向和速度。
首先(圖一),研究團隊利用感測器獲取加速度資訊,再將此資訊透過NVIDIA Flow Net 2.0進行光流估計,之後將每幀分成30個frames,每個frames為5º的receptive field,進行空間池化(Spatial Pooling)的計算。(空間池化是一種將鄰近區域的視覺信息整合起來的技術,具體上的做法為將光流場分為多個區域,並將每個區域中的光流向量進行平均或加權平均。這樣可以減少噪聲的影響,並提取出更穩定和可靠的速度估計。)最後再將每個receptive field的計算結果進行速度的估計,之後將結果進行整合,得到一個整體的速度估計。這個速度估計可以用來反映昆蟲在直線運動期間的速度。
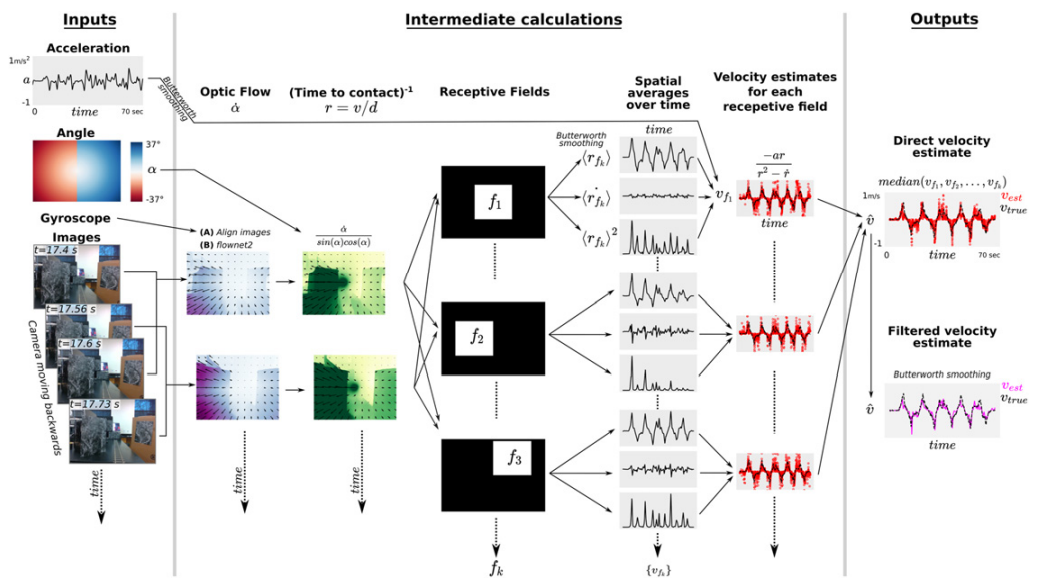 |
| 圖一、速度估計的計算方法架構 |
圖二為計算結果的RMSE:(A)藍色曲線為平均之前對receptive field進行平方操作的結果。綠色曲線為在光流中添加均值為零、標準差為0.5的高斯噪聲之後的結果。整個實驗中光流的平均值為0.06,因此這代表了相對較大的噪聲量。(B) 與(A)的綠色曲線相同,但對應於不同數量的等間隔receptive field。(C) 對比完整分辨率圖像序列的誤差(虛線,與A相同)與1度像素分辨率的誤差(實線)。由上結果可知,大概5º~20º的receptive field擁有最小的RMSE
 |
| 圖二、計算結果的RMSE |
撰文:余雪淩
參考資料:Lingenfelter B, Nag A, van Breugel F. Insect inspired vision-based velocity estimation through spatial pooling of optic flow during linear motion. Bioinspir Biomim. 2021 Sep 9;16(6). doi: 10.1088/1748-3190/ac1f7b. PMID: 34412040.



留言
張貼留言