飛行的藝術:小型蒼蠅如何在捕食獵物時巧妙避開障礙物
在自然界中,昆蟲往往需要透過空中追逐的方式捕捉其獵物,近期,一項發表在《Journal of Experimental Biology》的研究揭示了體型微小的食肉蒼蠅Holcocephala fusca,是如何在攔截移動目標的過程中,靈活避開路徑中的障礙物。
這項研究的主角,Holcocephala fusca蒼蠅,僅有6毫米大小,但它們在捕獵飛行中的表現卻驚人地類似於現代導彈系統。這些蒼蠅利用一種稱為「proportional navigation比例導航」的方法,這是一種通過放大目標視線(LOS)的旋轉來調整飛行者速度方向的技術(圖一)。但當它們的飛行路徑中出現障礙物時,這種單一的導航方法就不夠準確。
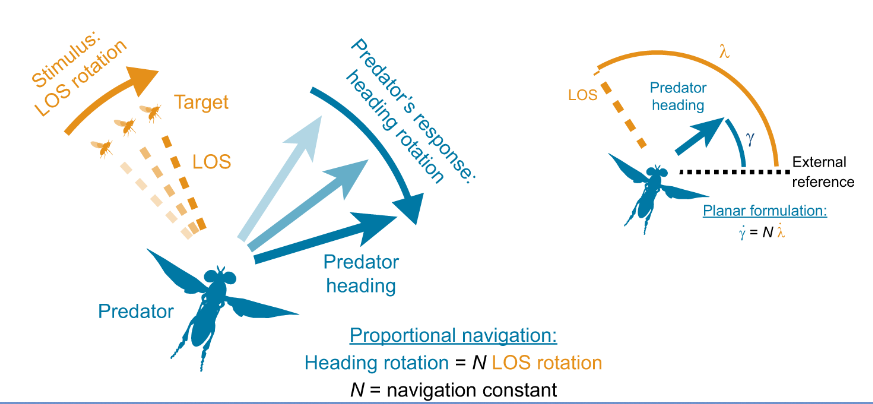 |
| 圖一 目標視線(LOS)的旋轉被一個導航常數(N)放大,並應用於蒼蠅的前進方向。右側的小圖描述了比例導航(pro-nav)幾何學的元素,獲得了$\dot{\gamma}=N\dot{\lambda}$關係式,展示了目標視線角度($\lambda$)和前進角度($\gamma$)的變化是如何從一個共同的外部參考框架中獲取的。 |
研究團隊設計了一系列實驗,來測試蒼蠅在遇到障礙物時的飛行反應。他們使用了一個特殊的裝置,模擬蒼蠅的自然環境。這個裝置包括一個移動的目標(一顆直徑1.3毫米的黑色珠子)和一個擺放在其飛行路徑中的障礙物(一條黑色醋酸纖維板)。障礙物的寬度不一,有的窄至2.5厘米,有的寬至5厘米(圖二)。
 |
| 圖二 這個裝置的核心是一個障礙物展示系統。主要組件是一個黑色醋酸纖維條,這個條狀物被固定在一個矩形的Perspex(一種透明塑料)框架的頂部。這個框架又被水平地放置在一個U型框架的臂部上。U型框架的每個角落都裝有滑輪,這些滑輪用來引導一條繞成圈的漁線。漁線上繫有一個直徑為1.3毫米的珠子,這個珠子用來模擬獵物。 |
透過高速攝像機捕捉蒼蠅的飛行軌跡,研究人員發現,當障礙物出現在蒼蠅的視野中時,它們會調整飛行路徑以避開障礙物,同時仍然繼續追蹤移動目標。這種行為顯示蒼蠅能夠同時處理兩種不同的導航需求:攔截移動目標和避開障礙物。
更有趣的是,當目標被障礙物暫時遮擋時,蒼蠅仍然能夠在目標再次出現後重新定位並完成攔截。然而,如果目標消失的時間超過約70毫秒,蒼蠅就會放棄攔截。
這項研究不僅展示了Holcocephala fusca蒼蠅驚人的飛行和導航能力,還為我們提供了研究其他生物導航系統的機會。這些發現可能對現代機器人學和人工智能導航系統的發展有重要意義。在這些系統中,能夠同時處理多重導航任務,特別是在動態和複雜的環境中,是一個巨大的挑戰。
此外,這項研究還強調了在自然界中,即使是最小和最不起眼的生物,也可能擁有令人驚嘆的能力和複雜的行為策略。這些微小的飛行昆蟲,用它們的翅膀和視覺系統,展示了一種巧妙的平衡藝術——在追蹤獵物和避開障礙物之間找到完美的平衡點。
總之,Holcocephala fusca蒼蠅的研究不僅豐富了我們對昆蟲行為學的認識,還可能開啟通往更先進導航技術的大門。這些微小的生物,以它們的獨特方式,正為科學和技術的進步做出貢獻。
撰文:余雪淩
原始論文:Fabian, S. T., Sumner, M. E., Wardill, T. J., & Gonzalez-Bellido, P. T. (2022). Avoiding obstacles while intercepting a moving target: a miniature fly's solution. Journal of Experimental Biology, 225(4), jeb243568.



留言
張貼留言