果蠅運動系統和本體感覺間的制衡
你是否有好奇過為什麼當你搔自己癢時和當別人和你鬧著玩時,兩者的感受相差如此之大?這其實是因為我們的運動系統中一種稱為「感知副本(efference copy)」的機制。比如當我們主動搔自己癢時,運動系統會提前送出訊號告訴你的感知系統:「我現在要做這件事,可能會讓你產生搔癢的感覺,但為了讓我專心做完動作,我需要你安靜一下。」像這樣運動系統會提前給你的大腦一個預警,好讓我們的動作完成的更加順利。而感知副本這個機制也存在於果蠅之中。在此篇論文中,作者便好奇果蠅的運動系統是怎麼如何創造出感知副本並協助果蠅行走的。
作者針對了果蠅主要負責本體感覺的器官,股節弦音器官(femoral chordotonal organ, FeCO),理論上,在運動時,運動系統應該要能抑制住本體感覺器官,以保持運動的順暢度不受本體感覺影響(圖一),為了驗證這個理論,作者研究了FeCO中的兩種軸突,Claw 和 Hook,前者和果蠅前腳的位置相關,後者則和前腳的運動相關(圖二)。在研究了 Claw 和 Hook 的上游神經元後,作者發現上游神經有80%以上屬於抑制性的 GABA 神經元。那麼運動系統是利用這些抑制性神經元來調控本體感覺的嗎?
 |
| 圖一(原論文 Fig1A.)本體感覺和運動系統間互相制衡的理論關係圖。 |
 |
| 圖二(原論文 Fig1B.)果蠅本體感覺器官FeCO和兩種軸突示意圖。 |
為了驗證這個猜想,作者分為實驗和模型模擬兩個部分,他利用果蠅實驗紀錄在果蠅主動行走時的神經反應,並利用事先訓練好的模型預測被動行走時的神經反應。他首先針對了 claw 的部分進行觀測,並發現不論是實驗或是模擬結果都擁有相似的神經反應(圖三)。證實不論在主動或被動的情況下,果蠅對前腳位置的本體感覺不受影響。
 |
| 圖三(原論文 Fig2G.)針對 Claw 的實驗和模擬結果。 |
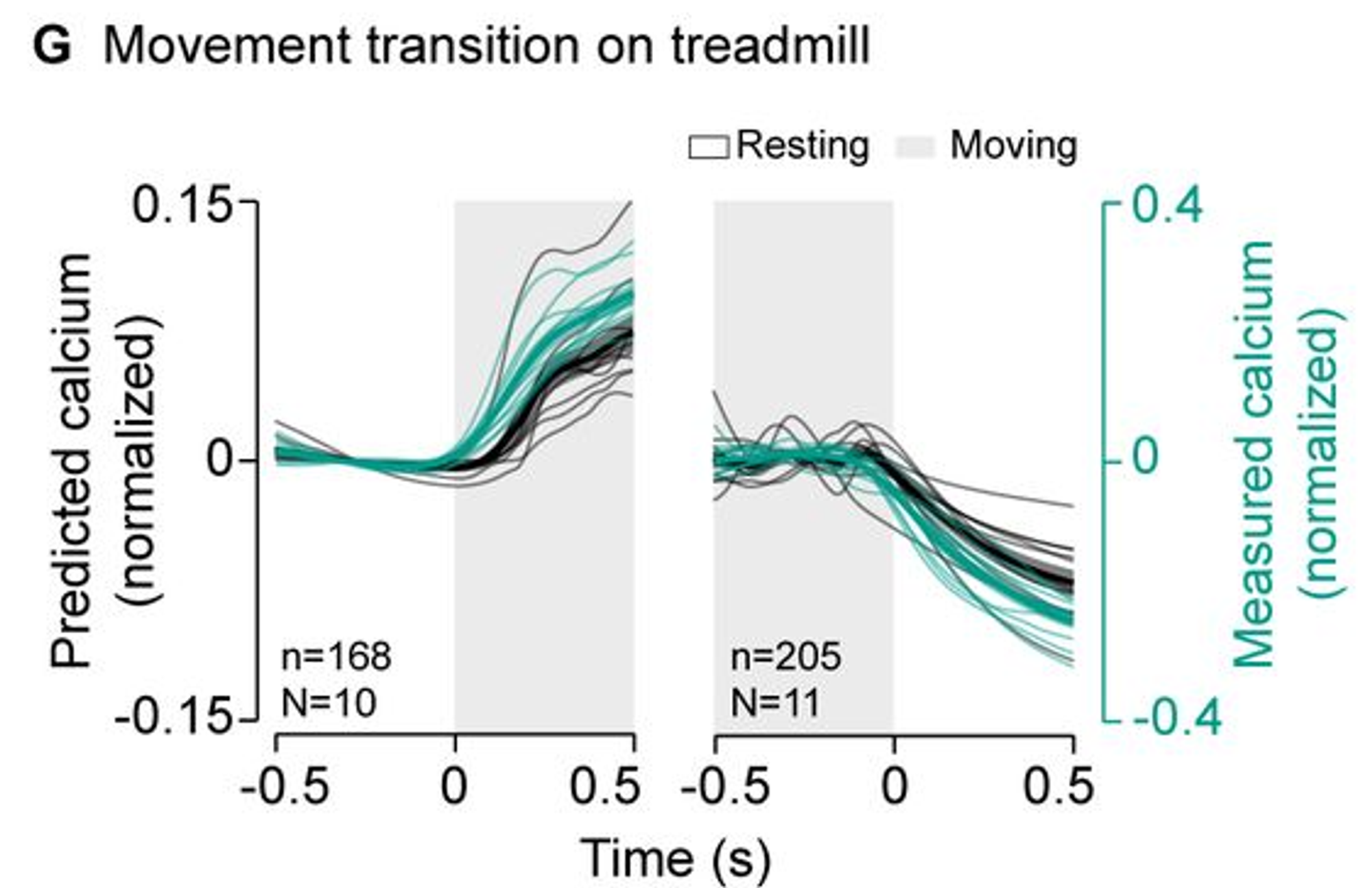
接著作者針對 hook 做了一樣的實驗,結果發現和 claw 不同,相較於被動行走,在主動行走的情況下,hook 的神經反應完全被抑制住了(圖四)。可知在主動行走的情況下。果蠅對前腳運動的本體感覺被抑制了。
 |
| 圖四(原論文 Fig3E.)針對 Hook 的實驗和模擬結果。 |
接下來的問題則是運動系統是靠什麼抑制 Hook 的?在調查了 hook 上游的 GABA 神經元後,作者發現他們多來自於 9A 半譜系。且這些 9A 抑制性神經元會在主動行走時產生反應,在被動行走時則不會(圖五)。
 |
| 圖五(原論文 Fig4I.)主動和被動行走下 9A 神經元的反應。 |
而在進一步調查 9A 神經元的上游後,發現的確有一群負責控制果蠅行走的下行神經元(descending neurons)。綜合以上的實驗,可以得出負責調控行走行為的下行神經元在果蠅主動行走時,將會透過下游的9A抑制性神經來抑制前腳運動的本體感覺,以完成感知副本的機制(圖六)。
 |
| 圖六(原論文 Fig5D.)理論和實際神經連結對比關係圖。 |
從這篇論文我們得知了果蠅運動系統是如何和感知系統進行調控,而在未來進一步的對 9A 神經元的調查更是可以讓我們更加的了解果蠅的整個運動系統,對於研究果蠅的知覺與運動有非常大的幫助。
撰文者:張寧 2024.04.07
資料來源
Chris J. Dallmann, Sweta Agrawal, Andrew Cook, Bingni W. Brunton, John C. Tuthill. (2023). Presynaptic inhibition selectively suppresses leg proprioception in behaving Drosophila.
bioRxiv 2023.10.20.563322; doi: https://doi.org/10.1101/2023.10.20.563322

留言
張貼留言