HDR影像融合--仿神經網路相機與傳統相機之應用
高動態範圍(High Dynamic Range, HDR)是指影像的曝光範圍大,在亮度較暗和較亮的部分都能看清楚紋路。但是想用傳統相機拍攝出同時具有高畫質、彩色以及HDR的影像並不容易,因此研究團隊嘗試融合傳統相機的高畫質、彩色影像,以及透過仿神經網路相機產生的影像的HDR特性,產生HDR彩色高畫質影像,並且再進一步產生HDR影片。
仿神經網路相機產生的影像是黑白色調,基本上是只呈現亮度的影像資訊,但同時可以清楚呈現亮度很亮和很暗的部分(HDR)。傳統相機除雖然沒有HDR的特性,其拍攝的影像是彩色且畫質較高 (Fig. 1)。
 |
| Fig. 1 NeurImg-HDR+的輸入影像,由仿神經網路相機以及傳統相機提供 |
在融合之前,先處理HDR亮度圖(intensity map)。由於尺寸比傳統相機影像小,所以需要拉大尺寸,此過程使用upsampling。因為影像尺寸拉大代表著像素值的數量增加,但增加的這些像素原先沒有數值,此時可以取相鄰的原圖像素值的平均,或是其他計算方法來決定他們要填的數值 (Fig. 2 Upsampling network)。同時,傳統相機影像的圖從RGB轉換成YUV格式,Y負責亮度資訊,而U和V負責色彩資訊。接著取Y頻道的亮度圖,與處理好的HDR亮度圖(XSR),進行3*3卷積以及應用U-net神經網路計算,融合成一張HDR亮度資訊圖(H¬¬Y) (Fig. 2 Luminance fusion network)。
 |
| Fig. 2 NeurImg-HDR+ 神經網路架構 |
有了處理好的亮度資訊,最後一步是要融入色彩:取U、V頻道的圖與亮度圖H¬¬Y融合。由於亮度圖和色彩圖像素數值的精密度不同,U、V需各自先取residual再與HY融合,最後轉回RGB格式。補色步驟採用GAN,其主要目的是讓呈色更自然。(Fig. 2 Chrominance compensation network)
Fig. 3展示NeurImg-HDR+和不同的方法的結果,其中第3直行是NeurImg-HDR+。可以看到嚴重曝光的部分(第二組的綠框-窗戶) 以及較陰暗的部分(第一組的紅框-側臉) 皆仍能清楚物體的外框及紋路。
 |
| Fig. 3 各種方法的結果比較 |
Fig. 4是兩種仿神經網路相機的影像處理結果。DAVIS和Vidar分別是event camera和spike camera (相機資訊請見Table 1) 。Fig. 4中,每組影像的箭頭左側是傳統相機和仿神經網路相機的原始輸入影像,箭頭右側是經過融合的HDR亮度圖以及最後產生的彩色HDR影像。一樣可以比對各組原始輸入和最後結果的紅框,在嚴重曝光和過於陰暗的部分都能調整成清楚的影像。
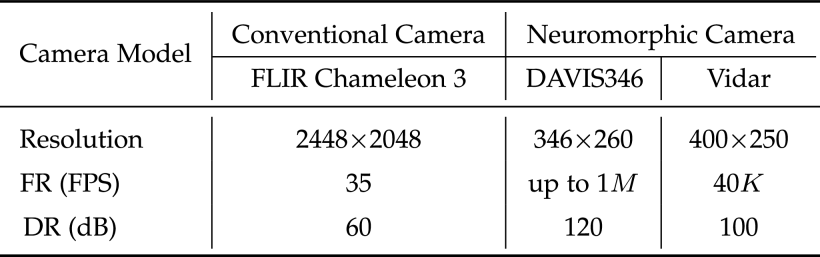 |
| Table 1 相機資訊 |
 |
| Fig. 4 兩種仿神經網路相機的結果:虛線左側是DAVIS相機,右側是Vidar相機 |
撰文:楊采綾
Reference: J. Han et al., "Hybrid High Dynamic Range Imaging fusing Neuromorphic and Conventional Images," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, no. 7, pp. 8553-8565, 1 July 2023, doi: 10.1109/TPAMI.2022.323133.


留言
張貼留言